
OXC (אָפּטישער קראָס-קאָנעקט) איז אַן עוואָלוציאָנירטע ווערסיע פֿון ROADM (רעקאָנפֿיגוראַבלער אָפּטישער צוגאב-דראָפּ מולטיפּלעקסער).
אלס דער קערן סוויטשינג עלעמענט פון אפטישע נעטוואָרקס, די סקאַלאַביליטי און קאָסטן-עפעקטיווקייט פון אפטישע קראָס-קאַנעקץ (OXCs) ניט בלויז באַשטימען די בייגיקייט פון נעטוואָרק טאָפּאָלאָגיעס, אָבער אויך דירעקט השפּעה די קאַנסטראַקשאַן און אָפּעראַציע און וישאַלט קאָס פון גרויס-וואָג אפטישע נעטוואָרקס. פאַרשידענע טייפּס פון OXCs ווייַזן באַטייטיק דיפעראַנסיז אין אַרכיטעקטוראַל פּלאַן און פאַנגקשאַנאַל ימפּלאַמענטיישאַן.
די פיגור אונטן אילוסטרירט א טראדיציאנעלע CDC-OXC (Colorless Directionless Contentless Optical Cross-Connect) ארכיטעקטור, וואס ניצט כוואַליע-לענג סעלעקטיוו סוויטשעס (WSSs). אויף דער ליניע זייט, דינען 1 × N און N × 1 WSSs ווי אריינגאַנג/אויסגאַנג מאָדולן, בשעת M × K WSSs אויף דער צולייגן/פאַלן זייט פאַרוואַלטן די צולייגן און פאַלן פון כוואַליע-לענג. די מאָדולן זענען ינטערקאַנעקטיד דורך אָפּטישע פיבערס אין דער OXC באַקפּליין.
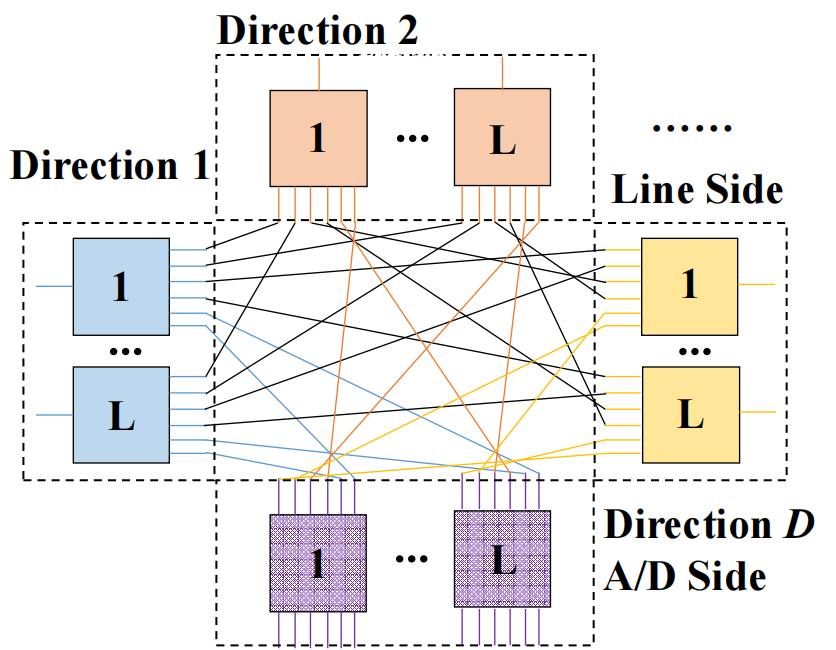
פיגור: טראדיציאנעלע CDC-OXC ארכיטעקטור
דאָס קען אויך דערגרייכט ווערן דורך קאָנווערטירן די באַקפּליין צו אַ ספּאַנקע נעץ, וואָס רעזולטירט אין אונדזער ספּאַנקע-OXC אַרכיטעקטור.
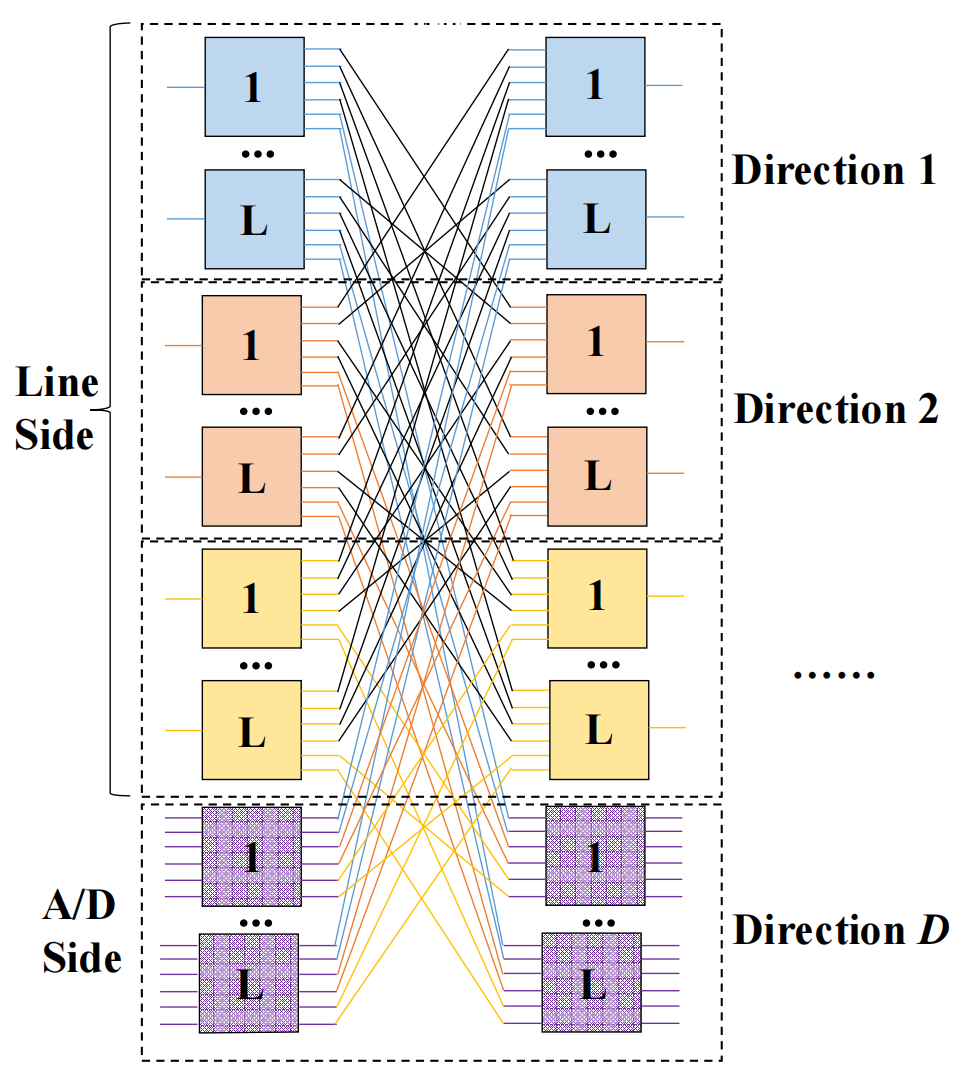
פיגור: ספּאַנקע-אָקסק אַרכיטעקטור
די פיגור אויבן ווייזט אז אויף דער ליניע זייט, איז די OXC פארבונדן מיט צוויי טיפן פארטן: דירעקשאנעל פארטן און פייבער פארטן. יעדער דירעקשאנעל פארט קארעספאנדירט צו דער געאגראפישער ריכטונג פון די OXC אין דער נעץ טאפאלאגיע, בשעת יעדער פייבער פארט רעפרעזענטירט א פאר ביידירעקשאנעל פיבערס אינעם דירעקשאנעלן פארט. א דירעקשאנעל פארט אנטהאלט קייפל ביידירעקשאנעל פייבער פארן (ד.ה. קייפל פייבער פארטן).
כאָטש די ספּאַנקע-באַזירטע OXC דערגרייכט שטרענג ניט-בלאָקירנדיקע סוויטשינג דורך אַ גאָר פֿאַרבונדענע באַקפּליין פּלאַן, ווערן אירע לימיטאַציעס מער און מער באַדייטנדיק ווי נעץ טראַפיק וואַקסט. די פּאָרט צייל לימיט פון קאמערציעלע כוואַליע-לענג סעלעקטיוו סוויטשיז (WSSs) (למשל, די איצטיקע מאַקסימום געשטיצט איז 1×48 פּאָרץ, אַזאַ ווי Finisar's FlexGrid Twin 1×48) מיינט אַז יקספּאַנדינג די OXC דימענסיע ריקווייערז ריפּלייסינג אַלע האַרדווער, וואָס איז טייַער און פאַרהיט די ווידער-ניצן פון יגזיסטינג ויסריכט.
אפילו מיט אַ הויך-דימענסיאָנעלער OXC אַרכיטעקטור באַזירט אויף קלאָס נעטוואָרקס, פֿאַרלאָזט עס זיך נאָך אויף טייערע M×N WSSs, מאַכנדיג עס שווער צו טרעפֿן אינקרעמענטאַלע אַפּגרעיד רעקווייערמענץ.
כדי צו אַדרעסירן דעם אַרויסרופן, האָבן פאָרשער פארגעשטעלט אַ נייַע כייבריד אַרכיטעקטור: HMWC-OXC (כייבריד MEMS און WSS קלאָוז נעטוואָרק). דורך אינטעגרירן מיקראָעלעקטראָמעכאַנישע סיסטעמען (MEMS) און WSS, האַלט די אַרכיטעקטור כּמעט-נישט-בלאָקירנדיקע פאָרשטעלונג בשעת זי שטיצט "צאָל-ווי-איר-וואַקסט" קייפּאַבילאַטיז, פּראַוויידינג אַ קאָסטן-עפעקטיוו אַפּגרעיד וועג פֿאַר אָפּטישע נעץ אָפּעראַטאָרן.
דער קערן פּלאַן פון HMWC-OXC ליגט אין זיין דריי-שיכטיקער קלאָס נעץ סטרוקטור.
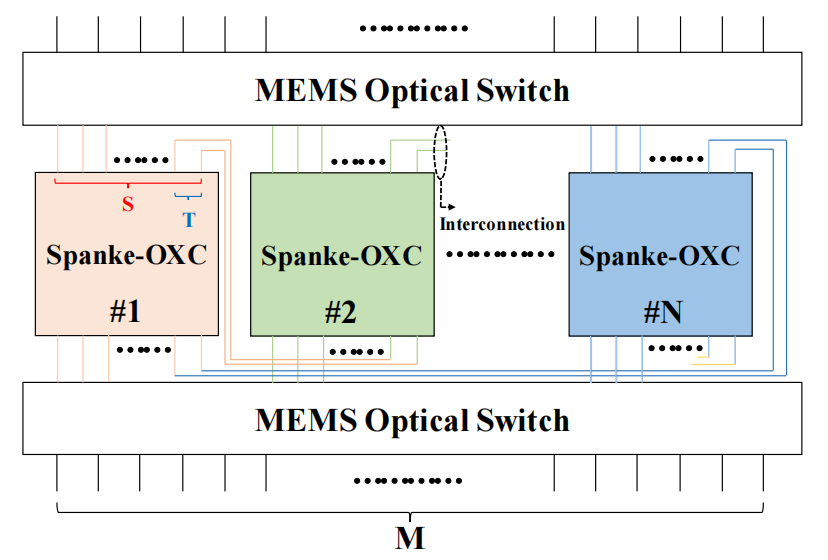
פיגור: ספּאַנקע-אָקסק אַרכיטעקטור באַזירט אויף HMWC נעטוואָרקס
הויך-דימענסיאָנעלע MEMS אָפּטישע סוויטשעס ווערן דיפּלויד ביי די אַרייַנגאַנג און אַרויסגאַנג שיכטן, אַזאַ ווי די 512×512 וואָג וואָס ווערט איצט געשטיצט דורך די היינטיקע טעכנאָלאָגיע, צו שאַפֿן אַ גרויס-קאַפּאַציטעט פּאָרט בעקן. די מיטל שיכט באַשטייט פון קייפל קלענערע ספּאַנקע-OXC מאָדולן, פאַרבונדן דורך "T-פּאָרץ" צו פֿאַרמינדערן אינערלעכע קאַנדזשעסטשאַן.
אין דער ערשטער פאַזע, קענען אָפּעראַטאָרן בויען די אינפראַסטרוקטור באַזירט אויף עקזיסטירנדיקע Spanke-OXC (למשל, 4×4 וואָג), פשוט דיפּלויינג MEMS סוויטשיז (למשל, 32×32) ביי די אַרייַנגאַנג און אַרויסגאַנג שיכטן, בשעת זיי האַלטן אַן איינציקן Spanke-OXC מאָדול אין דער מיטלער שיכט (אין דעם פאַל, די נומער פון T-פּאָרץ איז נול). ווי נעץ קאַפּאַציטעט רעקווייערמענץ פאַרגרעסערן, ווערן נייַע Spanke-OXC מאָדולן ביסלעכווייַז צוגעגעבן צו דער מיטלער שיכט, און T-פּאָרץ ווערן קאָנפיגורירט צו פאַרבינדן די מאָדולן.
למשל, ווען מען פארברייטערט די צאל מיטל-שיכט מאדולן פון איין צו צוויי, ווערט די צאל טי-פארטן געשטעלט צו איין, וואס פארגרעסערט די גאנצע גרייס פון פיר צו זעקס.
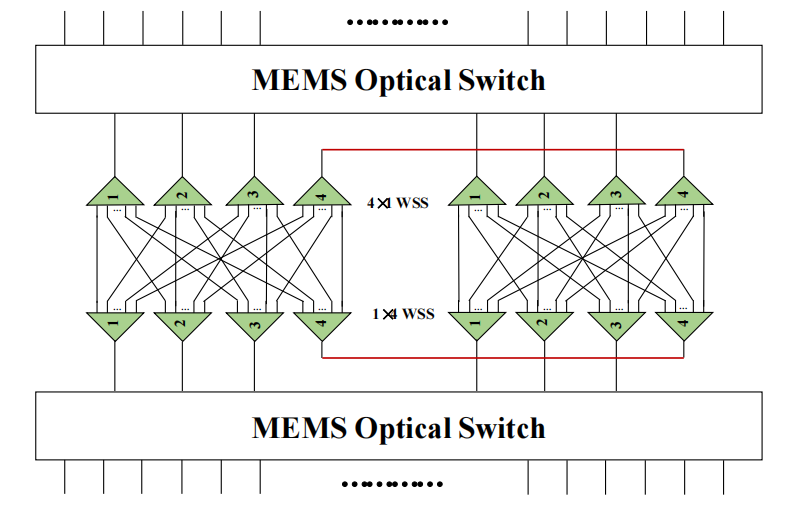
פיגור: HMWC-OXC בייַשפּיל
דער פּראָצעס פֿאָלגט די פּאַראַמעטער באַגרענעצונג M > N × (S − T), וואו:
M איז די צאָל MEMS פּאָרטן,
N איז די צאָל פון צווישן-שיכט מאָדולן,
S איז די צאָל פּאָרטן אין אַן איינציקן ספּאַנקע-OXC, און
ט איז די צאָל פון פֿאַרבונדענע פּאָרטן.
דורך דינאמיש צופאסן די פאראמעטערס, קען HMWC-OXC שטיצן א גראדואלע אויסברייטונג פון אן אנפאנגס-מאסשטאב ביז א ציל-דימענסיע (למשל, 64×64) אן צו פארטרעטן אלע הארדווער רעסורסן אויף איין מאל.
כדי צו באשטעטיגן די פאקטישע פאָרשטעלונג פון דעם אַרכיטעקטור, האָט די פאָרשונג מאַנשאַפֿט דורכגעפירט סימולאַציע עקספּערימענטן באַזירט אויף דינאַמישע אָפּטישע וועג ריקוועסץ.
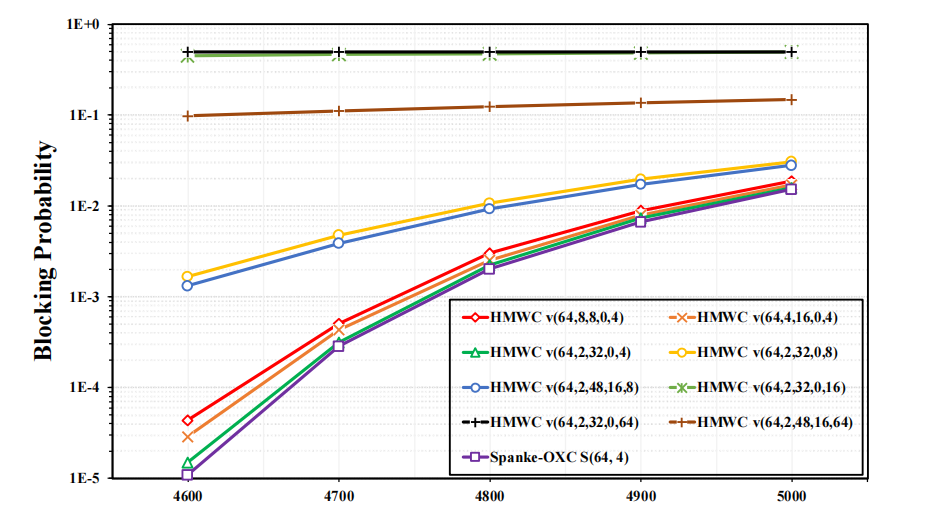
פיגור: בלאָקירנדיקע פאָרשטעלונג פון די HMWC נעץ
די סימולאציע ניצט אן ערלאנג טראפיק מאדעל, אננעמענדיג אז סערוויס פארלאנגען פאלגן א פואסאן פארטיילונג און סערוויס האלט צייטן פאלגן א נעגאטיווע עקספאנענציעלע פארטיילונג. די גאנצע טראפיק לאסט איז געשטעלט צו 3100 ערלאנגס. די ציל OXC דימענסיע איז 64×64, און די אינפוט און אויטפוט שיכט MEMS סקאלע איז אויך 64×64. די מיטל שיכט ספּאַנקע-OXC מאָדול קאנפיגוראציעס שליסן איין 32×32 אדער 48×48 ספעציפיקאציעס. די צאל פון טי-פארטן ריינדזשט פון 0 ביז 16 דעפענדינג אויף די סצענאר רעקווייערמענץ.
רעזולטאַטן ווייַזן אַז, אין דעם סצענאַר מיט אַ דירעקשאַנאַל דימענסיע פון D = 4, איז די בלאָקירנדיקע וואַרשיינלעכקייט פון HMWC-OXC נאָענט צו יענער פון דער טראַדיציאָנעלער ספּאַנקע-OXC באַזעלינע (S(64,4)). למשל, ניצן די v(64,2,32,0,4) קאָנפיגוראַציע, וואַקסט די בלאָקירנדיקע וואַרשיינלעכקייט מיט בלויז אַפּראָקסימאַטלי 5% אונטער מיטלמעסיקער לאָוד. ווען די דירעקשאַנאַלע דימענסיע וואַקסט צו D = 8, וואַקסט די בלאָקירנדיקע וואַרשיינלעכקייט צוליב דעם "טרונק עפֿעקט" און דער פֿאַרקלענערונג אין פֿאַזער לענג אין יעדער ריכטונג. אָבער, דאָס פּראָבלעם קען עפֿעקטיוו פֿאַרלייכטערט ווערן דורך פֿאַרגרעסערן די צאָל פֿון T-פּאָרטן (למשל, די v(64,2,48,16,8) קאָנפיגוראַציע).
באַמערקענסווערט, כאָטש די צוגאב פון מיטל-שיכטע מאָדולן קען פאַראורזאַכן אינערלעכע בלאָקירן רעכט צו טי-פּאָרט קאָנקורענץ, קען די אַלגעמיינע אַרכיטעקטור נאָך דערגרייכן אָפּטימיזירטע פאָרשטעלונג דורך צונעמען קאָנפיגוראַציע.
א קאסטן אנאליז אונטערשטרייכט ווייטער די מעלות פון HMWC-OXC, ווי געוויזן אין דער פיגור אונטן.
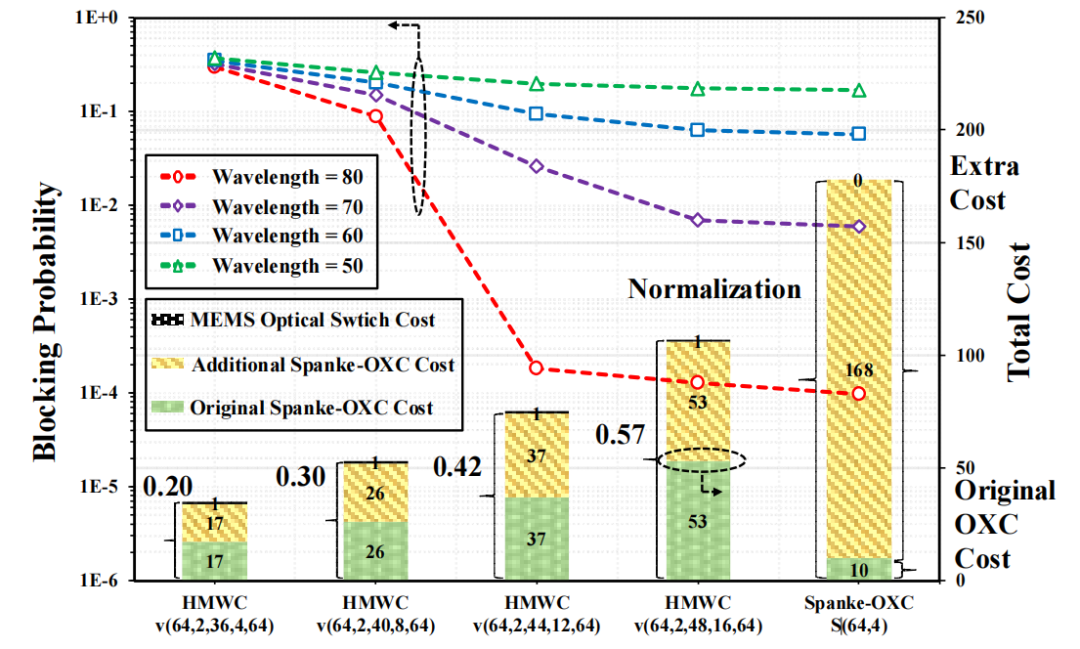
פיגור: בלאָקירנדיקע וואַרשיינלעכקייט און קאָסטן פון פאַרשידענע OXC אַרכיטעקטורן
אין הויך-דענסיטי סצענאַרן מיט 80 כוואַליע לענגס/פיבער, קען די HMWC-OXC (v(64,2,44,12,64)) רעדוצירן קאָסטן מיט 40% קאַמפּערד צו טראַדיציאָנעל ספּאַנקע-OXC. אין נידעריק-כוואַליע לענג סצענאַרן (למשל, 50 כוואַליע לענגס/פיבער), איז דער קאָסטן מייַלע נאָך מער באַטייטיק צוליב דער רעדוצירטער צאָל פון פארלאנגטע T-פּאָרץ (למשל, v(64,2,36,4,64)).
די עקאָנאָמישע נוץ שטאַמט פֿון דער קאָמבינאַציע פֿון דער הויכער פּאָרט געדיכטקייט פֿון MEMS סוויטשעס און אַ מאָדולאַרער יקספּאַנשאַן סטראַטעגיע, וואָס ניט נאָר פֿאַרמייַדט די קאָסטן פֿון גרויס-מאָסשטאַביגע WSS פאַרבייַט, נאָר אויך רעדוצירט ינקראַמענטאַלע קאָסטן דורך ווידער-ניצן עקזיסטירנדיקע Spanke-OXC מאָדולן. סימולאַציע רעזולטאַטן ווייַזן אויך אַז דורך אַדזשאַסטינג די נומער פֿון מיטל-שיכט מאָדולן און די פּראָפּאָרציע פֿון T-פּאָרץ, קען HMWC-OXC פֿלעקסיבל באַלאַנסירן פאָרשטעלונג און קאָסטן אונטער פֿאַרשידענע כוואַליע לענג קאַפּאַציטעט און ריכטונג קאָנפיגוראַציעס, פּראַוויידינג אָפּעראַטאָרן מיט מולטי-דימענסיאָנאַלע אָפּטימיזאַציע געלעגנהייטן.
צוקונפטיגע פאָרשונג קען ווייטער אויספאָרשן דינאַמישע טי-פּאָרט אַלאָקאַציע אַלגעריטמען צו אָפּטימיזירן אינערלעכע רעסורסן נוצן. דערצו, מיט אַדוואַנסאַז אין MEMS מאַנופאַקטורינג פּראָצעסן, וועט די אינטעגראַציע פון העכער-דימענסיאָנאַלע סוויטשיז ווייטער פֿאַרבעסערן די סקאַלאַביליטי פון דעם אַרכיטעקטור. פֿאַר אָפּטישע נעץ אָפּעראַטאָרן, איז דעם אַרכיטעקטור ספּעציעל פּאַסיק פֿאַר סצענאַריאָס מיט אַנסערטאַנט פאַרקער וווּקס, פּראַוויידינג אַ פּראַקטיש טעכניש לייזונג פֿאַר בויען אַ ווידערשטאַנדיק און סקאַלאַבאַל אַלע-אָפּטיש באַקבאָון נעץ.
פּאָסט צייט: 21סטן אויגוסט, 2025